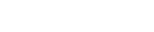
 This blog post covers how emergent gaming tools and technologies have been used to make high-fidelity defence simulation, including LVC (Live, Virtual and Constructive) simulation which is the way ahead for most military simulators. The LVC Simulation was done atop a high-fidelity terrain reconstruction which was mapped in-house via a Drone operation. The high-fidelity, one-to-one scale terrain already had about 30times the resolution available from Google earth, and was then made interactive and compliant with an LVC Simulation architecture where troops and tanks could train simultaneously. The concept was successfully demonstrated and highly appreciated, as part of CII & Indian Army’s Seminar on Simulation, conducted by the Army Design Bureau. This is part 2 and concluding post on the entire exercise, and part 1 covers the aerial mapping of the terrain via a drone here. High fidelity synthetic terrain recreationThe attached graphic illustrates the entire pipeline of constructing the high-fidelity terrain for the simulation exercise. Major parts are further explained below. 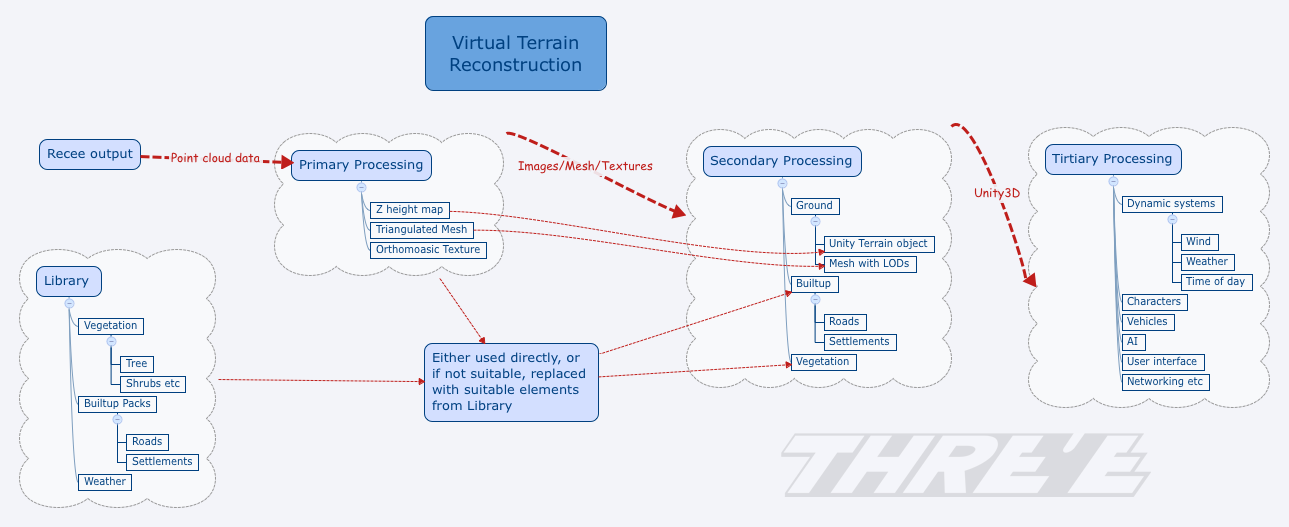
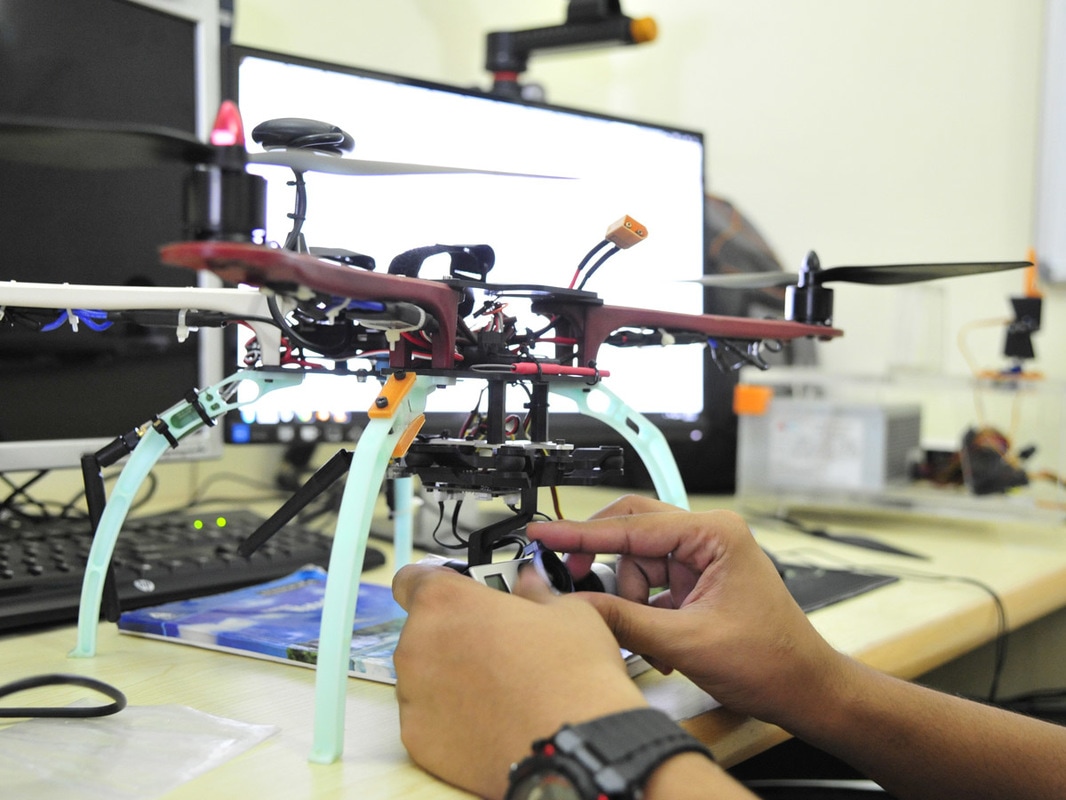
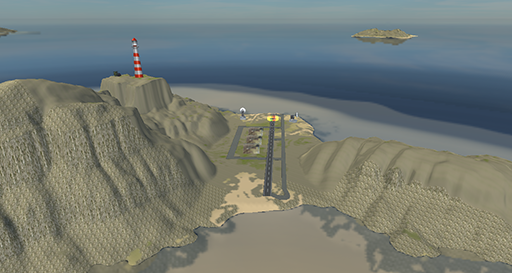
The image below, shows the synthetic terrain (virtual) constructed via the above pipeline.   This is a two part blog post. Part 1 talks about the background to the entire exercise, the Part 2 talks about the simulation exercise which was built on top of the entire Drone Op generated data. The background to this entire operation were our simulation activities that we were doing for Defence. Our past experience had mostly been with the Indian Air Force, and recently had also done some aviation simulation works for the Indian Navy. However when we demonstrated the same to the Army, the feedback given was ‘Well, all this simulation, terrain recreation etc is fine for aircrafts flying thousands of feet above the ground, but we need something which can give a soldier a feeling of if he has the boots on the ground’. This needed a very highly accurate ground mapping which required two elements – a digital elevation map (known as DEM) and ground texture. Now DEMs were available, but those in the public domain had extremely low resolutions, only suited for very high-altitude passes, like those available from NASA and Japan Space Systems. Higher resolution DEM imagery is either available only to military (including ISRO’s own DEM data – but we didn’t have access to that), or very expensive to buy for commercial use. Google earth (including Pro) pack – while allowed you to export imagery, it didn’t allow you to export the elevation, and even imagery had to be stamped with Google earth’s logo. And the resolution wasn’t good that we wanted anyway. The target that had been give to us for the textures resolution was – 10 cm per pixel. A massively ambitious target. But audacious goals only embolden us to achieve them. We decided, we’d get our DEM via an aerial survey. Choice of platformIn order to do an aerial DEM, we obviously needed an unmanned aerial system (UAS), or commonly known as – Drone. There were many choices and factors
Learning to fly
 Guardians of the Skies, the official game of the Indian Air Force was launched about two years ago, and has gone on to be downloaded more than 3 million times, and won a couple of awards. Here is looking back at its story, which not only captures how it came into being and what went behind the scenes, but also a brief 'coming-of-age' of the small team which made it. You can get the game for Android, iOS and Windows. Why do we make games ?Games are supposed to be an escape from the reality, in a world of dreams. Where we can be what we wanted to be before we got caught up in the daily grind.
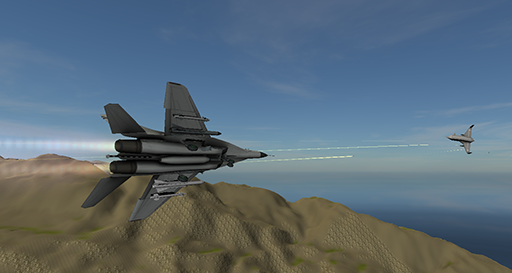
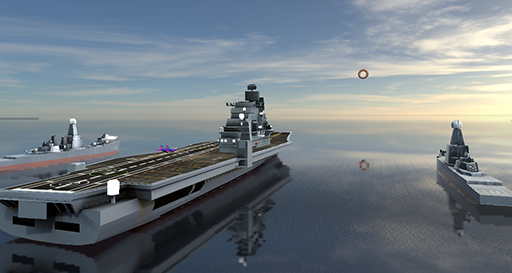
Dear Readers.. On behalf of team Threye, allow us to share our first Virtual Reality game, something which we've been working across the year 2015-16, coming from the genre of aircraft simulators, you can enjoy missions like takeoff from aircraft carrier, land on sea/ground, engage enemy aircrafts etc. The current aircraft and missions available are based on a Mig29, it is planned to add more aircrafts, and more scenarios in future. Meanwhile, please grab the beta here and give it a spin. For best experience, use a VR HMD and a joystick, but it works on standard PC with keyboard and gamepad as well. ACE-VR_Beta.zip |
Follow updates
Categories
All
Archives
February 2017
|







 RSS Feed
RSS Feed
SIGN UP FOR OUR NEWSLETTER
|
GET OUR APPS
|
|
|
|
|
CONNECT WITH US
|
|
|
|
All rights reserved. Threye Interactive Pvt Ltd. 2021